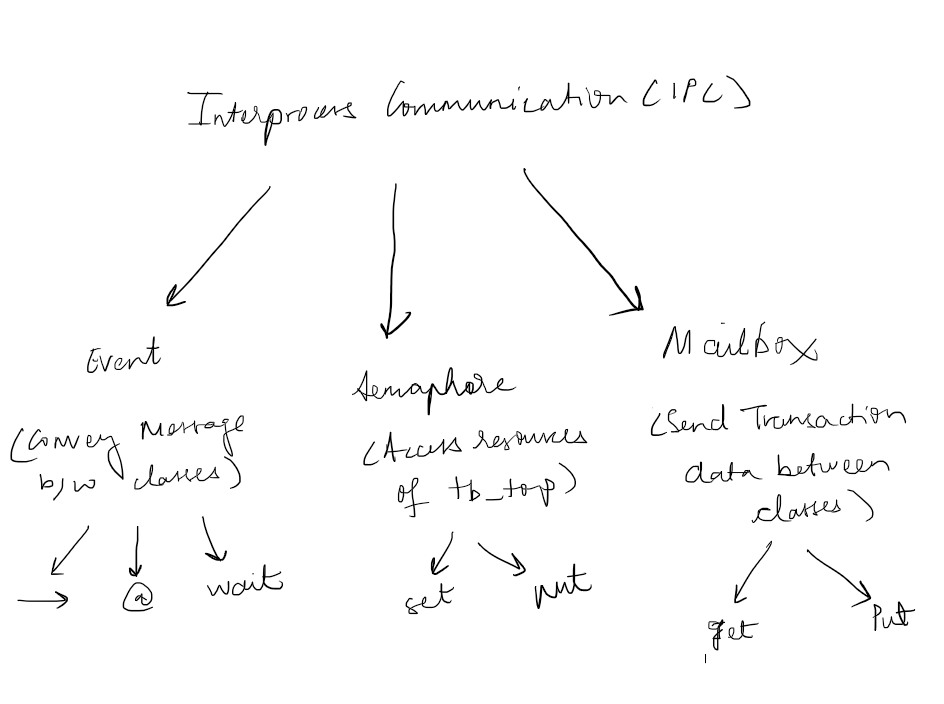
/// Trigger : ->
/// edge sensitive_blocking @(), level_sensitive_non_blocking wait()
module tb;
event a;
initial begin
#10;
-> a;
end
initial begin
//@(a);
wait(a.triggered);
$display("Received Event %0t", $time);
end
endmodule
@ vs Wait
/// Trigger : ->
/// edge sensitive_blocking @(), level_sensitive_non_blocking wait()
module tb;
event a1,a2;
initial begin
-> a1;
-> a2;
end
initial begin
//@(a1);
wait(a1.triggered);
$display("Event A1 Trigger");
//@(a2);\
wait(a2.triggered);
$display("Event A2 Trigger");
end
endmodule
Executing Multiple Processes
module tb;
int data1, data2;
event done;
int i = 0;
////Generator
initial begin
for(i = 0; i < 10;i++) begin
data1 = $urandom();
$display("Data Sent: %0d", data1);
#10;
end
-> done ;
end
////Driver
initial begin
forever begin
#10;
data2 = data1;
$display("Data RCVD: %0d", data2);
end
end
//////////////////
initial begin
wait(done.triggered);
$finish();
end
endmodule
Multiple Process with FORK JOIN
module tb;
int i =0;
bit [7:0] data1,data2;
event done;
event next;
task generator();
for(i = 0; i<10; i++) begin
data1 = $urandom();
$display("Data Sent : %0d", data1);
#10;
wait(next.triggered);
end
-> done;
endtask
task receiver();
forever begin
#10;
data2 = data1;
$display("Data RCVD : %0d",data2);
->next;
end
endtask
task wait_event();
wait(done.triggered);
$display("Completed Sending all Stimulus");
$finish();
endtask
initial begin
fork
generator();
receiver();
wait_event();
join
///////
end
endmodule
Demonstration of FORK_JOIN
module tb;
task first();
$display("Task 1 Started at %0t",$time);
#20;
$display("Task 1 Completed at %0t",$time);
endtask
task second();
$display("Task 2 Started at %0t",$time);
#30;
$display("Task 2 Completed at %0t",$time);
endtask
task third();
$display("Reached next to Join at %0t",$time);
endtask
initial begin
fork
first();
second();
join
third();
end
endmodule
Understanding FORK_JOIN_ANY
module tb;
task first();
$display("Task 1 Started at %0t",$time);
#20;
$display("Task 1 Completed at %0t",$time);
endtask
task second();
$display("Task 2 Started at %0t",$time);
#30;
$display("Task 2 Completed at %0t",$time);
endtask
task third();
$display("Reached next to Join at %0t",$time);
endtask
initial begin
fork
first();
second();
join_any
third();
end
endmodule
Understanding FORK JOIN_NONE
module tb;
task first();
$display("Task 1 Started at %0t",$time);
#20;
$display("Task 1 Completed at %0t",$time);
endtask
task second();
$display("Task 2 Started at %0t",$time);
#30;
$display("Task 2 Completed at %0t",$time);
endtask
task third();
$display("Reached next to Join at %0t",$time);
endtask
initial begin
fork
first();
second();
join_none
third();
end
endmodule
class first;
rand int data;
constraint data_c (data < 10; data > 0;)
endclass
class second;
rand int data;
constraint data_c (data > 10; data < 20;)
endclass
class main;
semaphore sem;
first f;
second s;
int data;
int i = 0;
task send_first();
sem.get(1);
for (i = 0; i<10; i++) begin
f.randomize();
data = f.data;
$display("First access Semaphore and Data sent : %0d", f.data);
#10;
end
sem.put(1);
$display("Semaphore Unoccupied");
endtask
task send_second();
sem.get(1);
for(i = 0; i<10; i++) begin
s.randomize();
data = s.data;
$display("Second access Semaphore and Data sent : %0d", s.data)
#10;
end
sem.put(1);
endtask
task run();
sem = new(1);
f = new();
s = new();
fork
send_first();
send_second();
join
endtask
endclass
module tb;
main m;
initial begin
m = new();
m.run();
end
initial begin
#250;
$finish();
end
endmodule
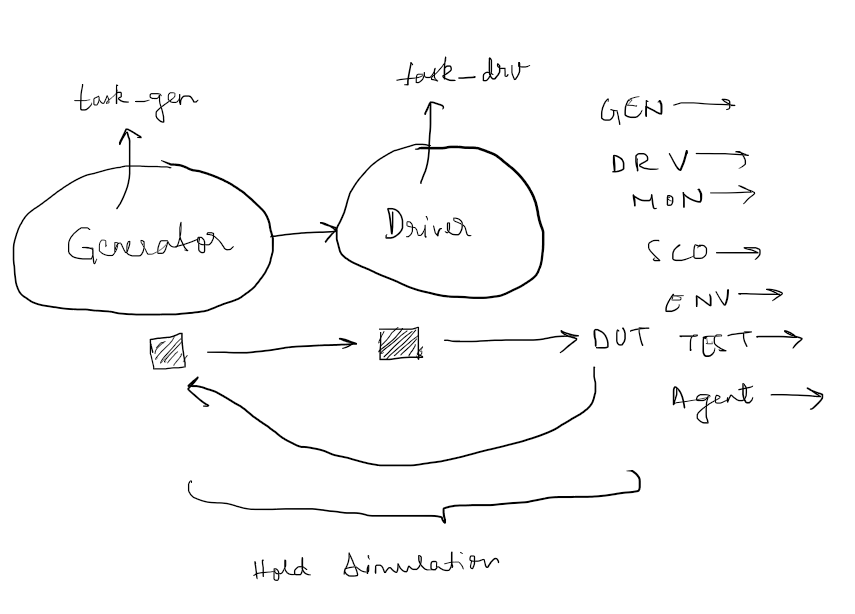
Understanding Mailbox
class generator;
int data = 56;
mailbox mbx; ///gen2drv
task run();
mbx.put(data);
$display("[GEN]: SENT DATA: %0d", data);
endtask
endclass
class driver;
int datac = 0;
mailbox mbx;
task run();
mbx.get(datac);
$display("[DRV]: RCVD Data; %0d", datac);
endclass
module tb;
generator gen;
driver drv;
mailbox mbx;
initial begin
gen = new();
drv = new();
mbx = new();
gen.mbx = mbx;
drv.mbx = mbx;
gen.run();
drv.run();
end
endmodule
Specifying Mailbox with Custom Constructor
class generator;
int data = 56;
mailbox mbx; ///gen2drv
function new(malbox mbx);
this.mbx = mbx;
endfunction
task run();
mbx.put(data);
$display("[GEN]: SENT DATA: %0d", data);
endtask
endclass
class driver;
int datac = 0;
mailbox mbx;
function new(malbox mbx);
this.mbx = mbx;
endfunction
task run();
mbx.get(datac);
$display("[DRV]: RCVD Data; %0d", datac);
endclass
module tb;
generator gen;
driver drv;
mailbox mbx;
initial begin
mbx = new();
gen = new(mbx);
drv = new(mbx);
gen.mbx = mbx;
drv.mbx = mbx;
gen.run();
drv.run();
end
endmodule
Sending Transaction data with Mailbox
class transaction;
rand bit [3:0] din1;
rand bit [3:0] din2;
bit [4:0] dout;
endclass
class generator;
transaction t;
mailbox mbx;
function new(mailbox mbx);
this.mbx = mbx;
endfunction
task main();
for (int i = 0, i<10; i++) begin
t = new();
assert(t.randomize) else $display("Randomization Failed");
$display("[GEN] : DATA SENT : din1 : %0d and din2 : %0d", t.din1, t.din2);
mbx.put(t);
#10;
end
endtask
endclass
class driver;
transaction dc;
mailbox mbx;
function new(mailbox mbx);
this.mbx = mbx;
endfunction
task main();
forever begin
mbx.get(dc);
$display("[DRV] : DATA RCVD : din1 : %0d and din2 : %0d, dc.din1, dc.din2);
#10;
end
endtask
endclass
module tb;
generator g;
driver d;
mailbox mbx;
inital begin
mbx = new();
g = new(mbx);
d = new(mbx);
fork
g.main();
d.main();
join
end
Understanding Parameterized Mailbox
class transaction;
bit [7:0] data;
endclass
class generator;
int data = 12;
transaction t;
mailbox #(transaction) mbx;
logic [7:0] temp = 3;
function new(mailbox #(transaction) mbx);
this.mbx = mbx;
endfunction
task run();
t = new();
t.data = 45;
mbx.put(temp);
$display("[GEN] : Data Send from Gen : %0d", t.data);
endtask
endclass
class driver;
mailbox #(transaction) mbx;
transaction data;
function new(mailbox #(transaction) mbx);
this.mbx = mbx;
endfunction
task run();
mbx.get(data);
$display("[DRV] : DATA rcvd: %0d", data.data);
endtask
endclass
module tb;
generator gen;
driver drv;
mailbox #(transaction) mbx;
initial begin
mbx = new();
gen = new.(mbx);
drv = new(mbx);
gen.run();
drv.run();
end
endmodule
Using Parameterized Mailbox
class transaction;
bit [7:0] data;
endclass
class generator;
int data = 12;
transaction t;
mailbox #(transaction) mbx;
logic [7:0] temp = 3;
function new(mailbox #(transaction) mbx);
this.mbx = mbx;
endfunction
task run();
t = new();
t.data = 45;
mbx.put(temp);
$display("[GEN] : Data Send from Gen : %0d ",t.data);
endtask
endclass
class driver;
mailbox #(transaction) mbx;
transaction data;
function new(mailbox #(transaction) mbx);
this.mbx = mbx;
endfunction
task run();
mbx.get(data);
$display("[DRV] : DATA rcvd : %0d",data.data);
endtask
endclass
module tb;
generator gen;
driver drv;
mailbox #(transaction) mbx;
initial begin
mbx = new();
gen = new(mbx);
drv = new(mbx);
gen.run();
drv.run();
end
endmodule